Natal para ma(r)kers: Enfeites personalizados para árvores de Natal feitos por um robô
Um Spherebot ou Eggbot desenha padrões a partir de um PC no que quer que seja redondo. Através de thingiverse.com e instructables.com pode-se encontrar vários tutoriais e modelos para os pequenos robôs, que também poderiam ser chamados de plotters de esferas. A lista de material é bastante semelhante para a maioria dos Spherebots. São necessários dois motores Nema 17, um pequeno servo, um Arduino Uno, um escudo CNC e drivers de motores passo-a-passo. Além disso, é necessária uma fonte de alimentação, parafusos, cabos, esferas e marcadores correspondentes. Na Amazon, a lista completa de material tem uma etiqueta de preço de algo em torno de $50. Se você tiver uma impressora 3D, você provavelmente pode emprestar seus caros motores Nema 17 e drivers de motor passo-a-passo para o projeto

Instruções e manuais de construção
Há muitas instruções mais ou menos simples para um Eggbot em várias páginas de bricolage comoinstructables e thingiverse. A maioria delas pode ser feita com uma impressora 3D. Pelo menos 20 desses Eggbots podem ser encontrados por vários nomes através do thingiverse.com. Eu juntei uma pequena seleção em uma coleção aqui. Os hobbistas com recursos podem provavelmente prescindir de uma impressora 3D para alguns projetos e só trabalhar com compensados, parafusos, rolamentos de esferas e alguns suportes. Escolhi o projeto de Herbert Schützeneder, que, creio eu, é muito inteligente. A maioria das peças de sua Eggbot são impressas em 3D. Basicamente, a lista de compras é muito semelhante para a maioria dos Eggbots. Isto se deve também ao fato de que é o original de Evil Mad Scientist tem estado disponível como um projeto de código aberto por vários anos. Assim, na maioria das vezes, são necessários apenas ajustes para adaptar as réplicas aos diferentes métodos de fabricação.
BOM para o Eggduino por Herbert_b1:
2 × Nema 17 motor passo-a-passo
1 × Kits CNC com Clone Arduino Uno
1 × Servo motor SG90 ou KY66
1 × parafusos M3
1 × 608 rolamento de esferas
1 × capacitor com 10 µF a 100 µF
1 × conversor AC/DC que fornece uma tensão entre 12 V e 24 V
alguns marcadores (permanentes)
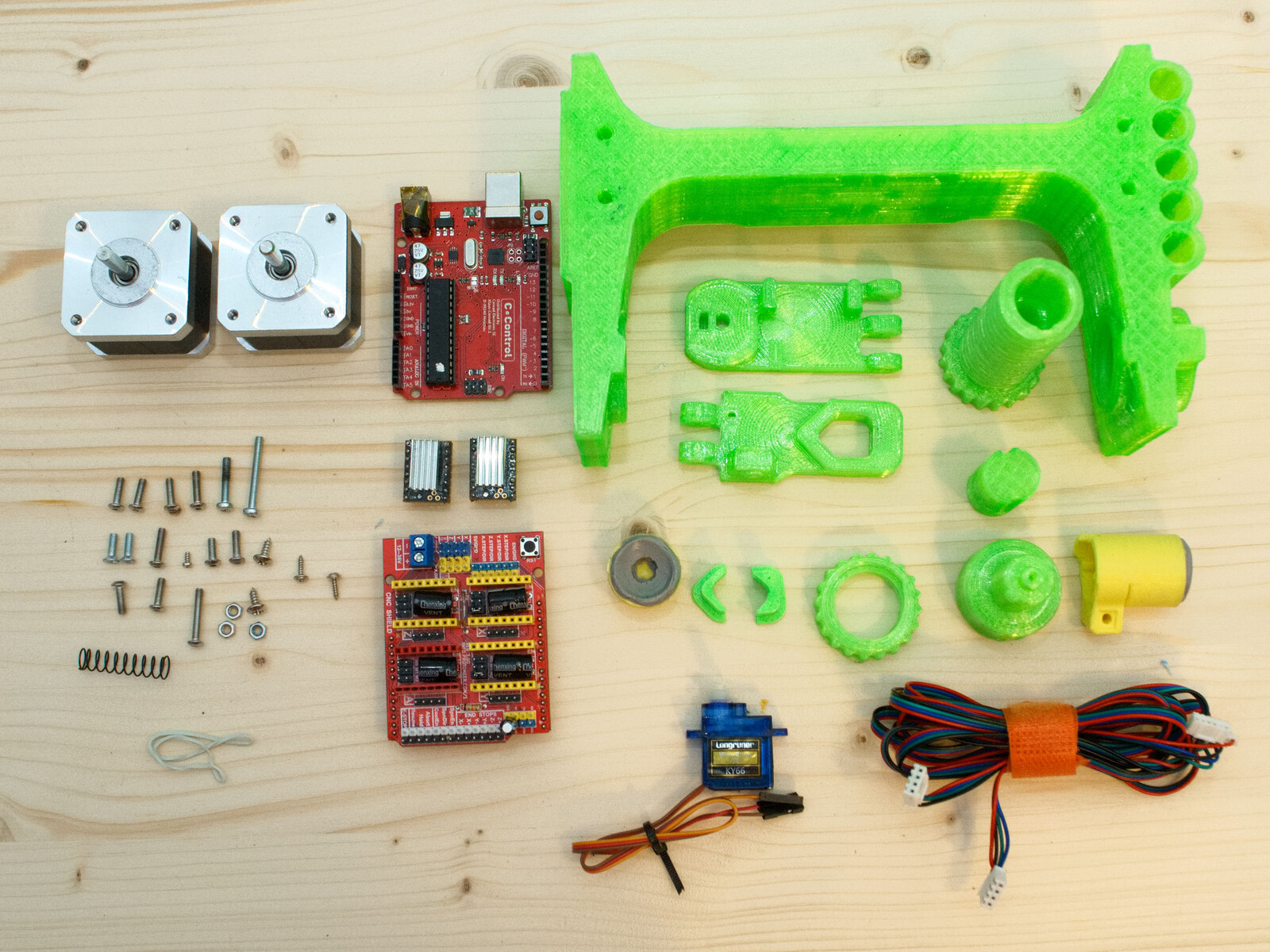
No meu caso, os motores passo a passo e os drivers dos motores passo TMC2100 vêm de uma impressora 3D que não está mais em uso. Como fonte de alimentação, uso um velho tijolo de laptop com 19 V. A maior voltagem é mais uma vantagem para o CNC-Shield, já que o clone Arduino Uno é alimentado por USB. Com a voltagem mais alta, os motores podem ser acionados com menos corrente. Isto resulta em menos dissipação de calor nos motores e na eletrônica. Também não tive que comprar um rolamento de esferas, já que os rolamentos de esferas 608 são os mesmos que os de skates e patins em linha.
Software - Download, instalação e modificação
O Arduino Uno (clone) é programável utilizando a IDE Arduino. O aplicativo pode ser baixado de www.arduino.cc/en/software ou adquirido de várias fontes. No Windows, o aplicativo também está disponível em para instalação através do Microsoft Store
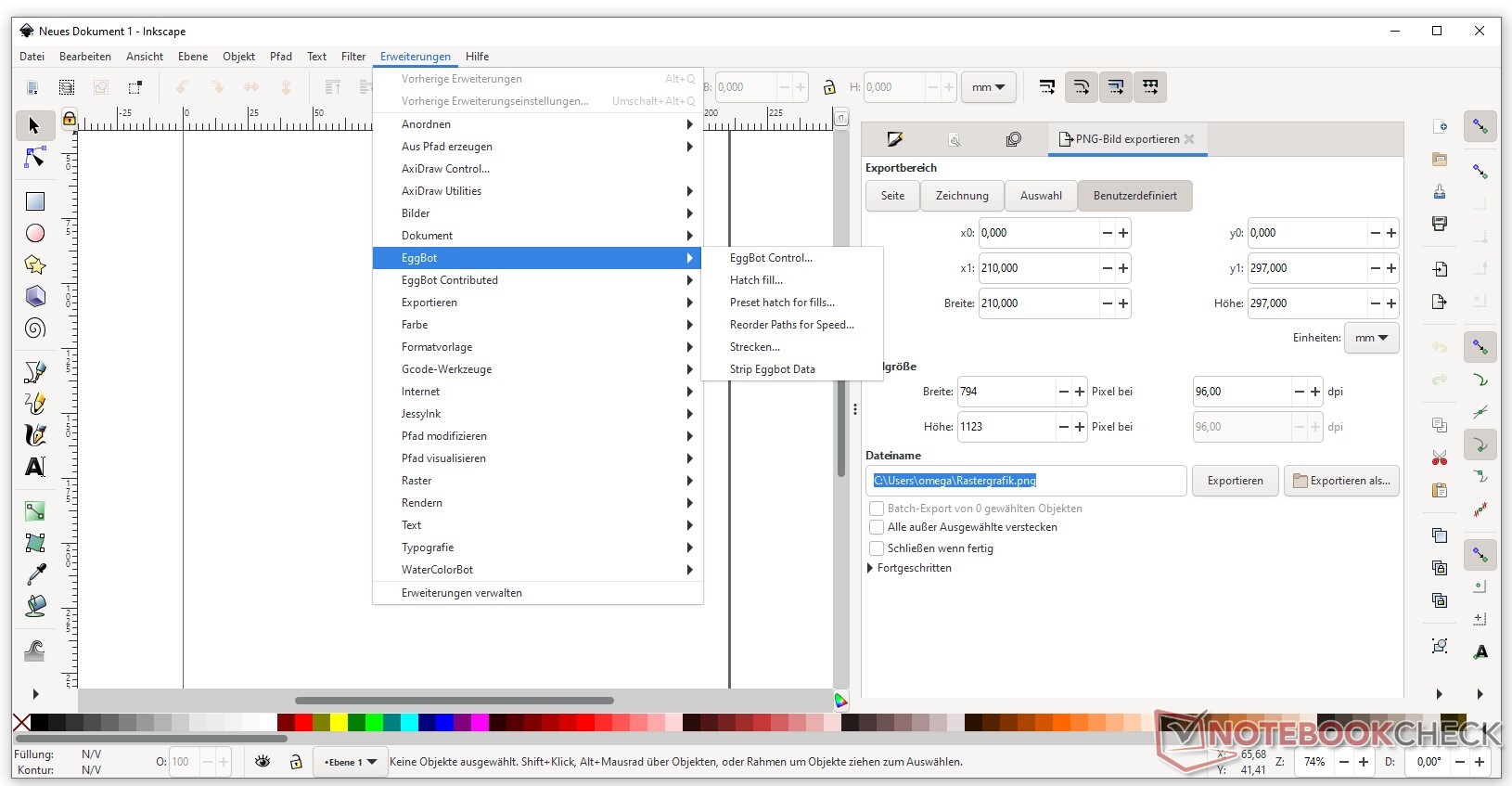
Para criar as imagens e padrões para o baile da árvore de Natal, o aplicativo de código aberto Inkscape https://inkscape.org/release/inkscape-1.1.1/ com uma extensão EggBot é necessária. A última versão 1.1 pode ser baixada via na página de lançamento.
Um firmware pronto para uso para o Arduino Uno (clone) está disponível no Github no repositório Eggbot da Plex3r. Aqui você pode iniciar o download do arquivo como um arquivo zip clicando sobre o elemento de código verde. As instruções da Plex3r para modificar a extensão Eggbot infelizmente não funcionam com as versões mais recentes do software.
A última versão 2.81 do EggBot é baixada do repositório do Evil Mad Scientist do site https://github.com/evil-mad/EggBot/releases/tag/v2.8.1 e modificado em seu lugar. Você precisará dos dois arquivos eggbot-inkv1r2.zip e EggBotExamples_v281.zip da pasta de liberação.
Programação do Arduino Uno
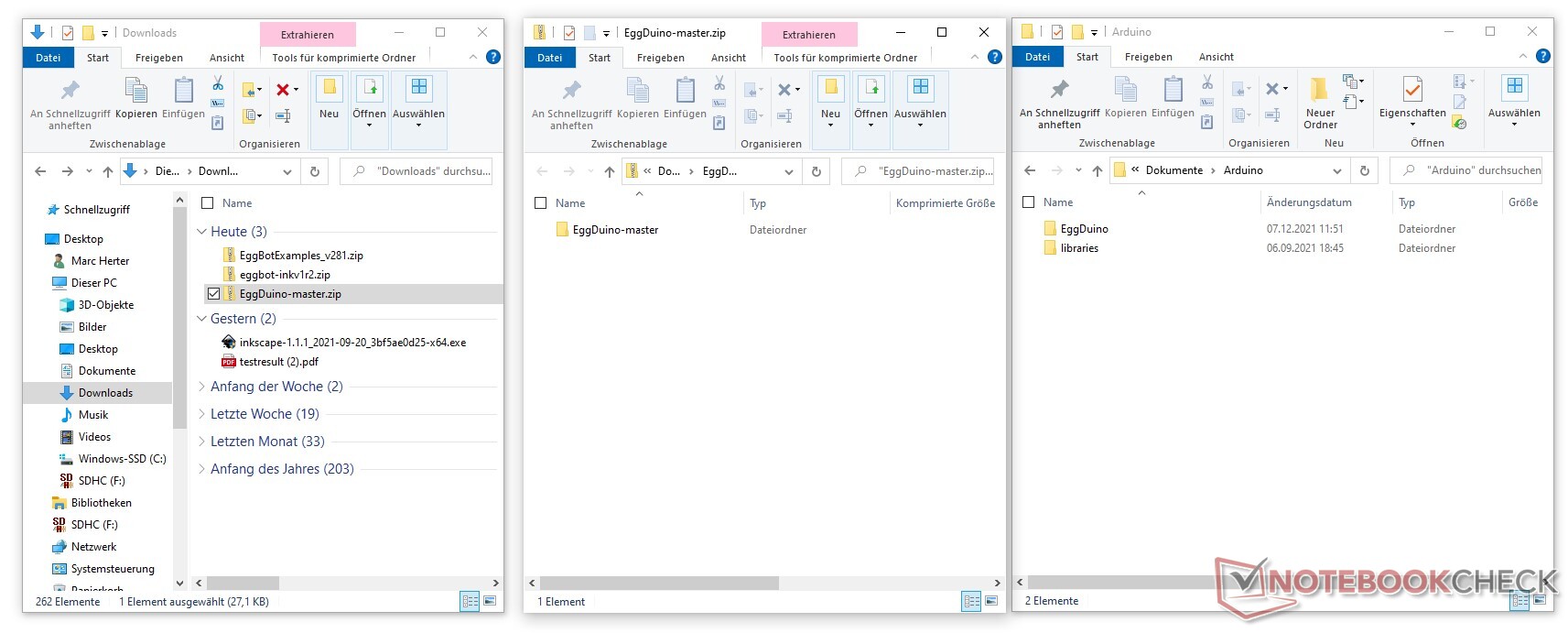
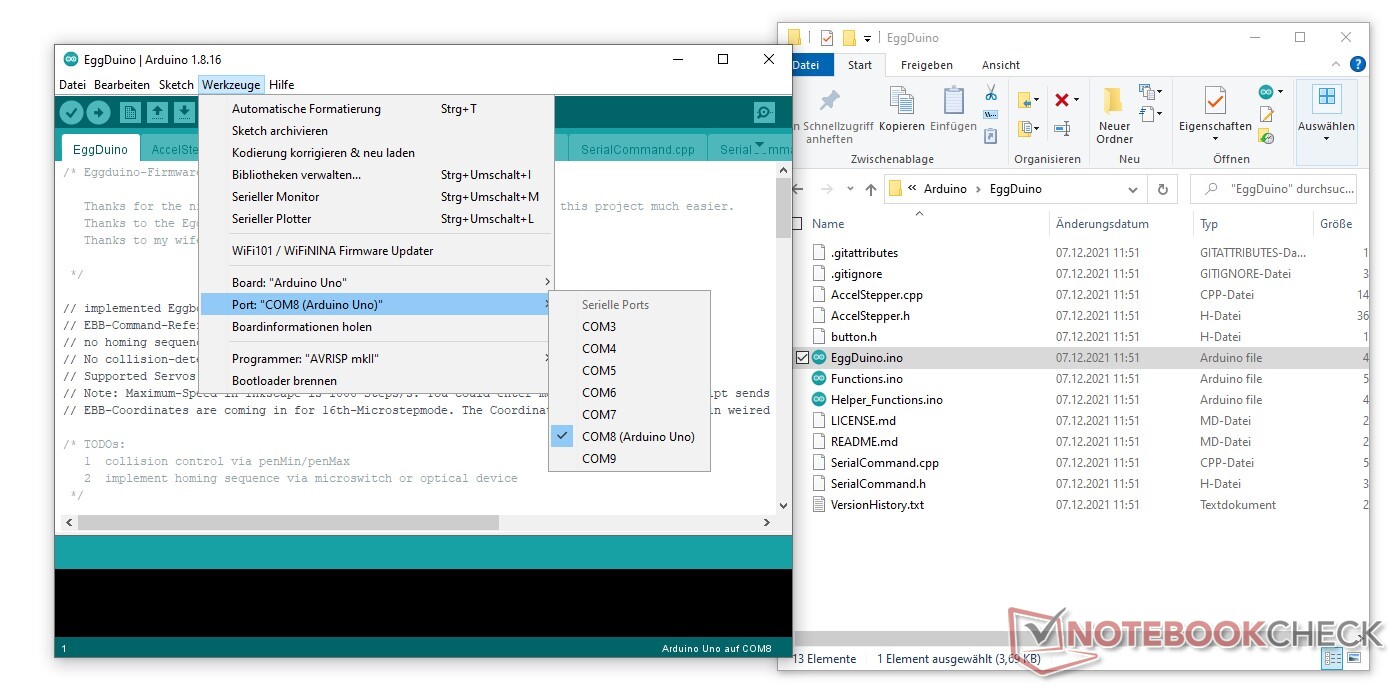
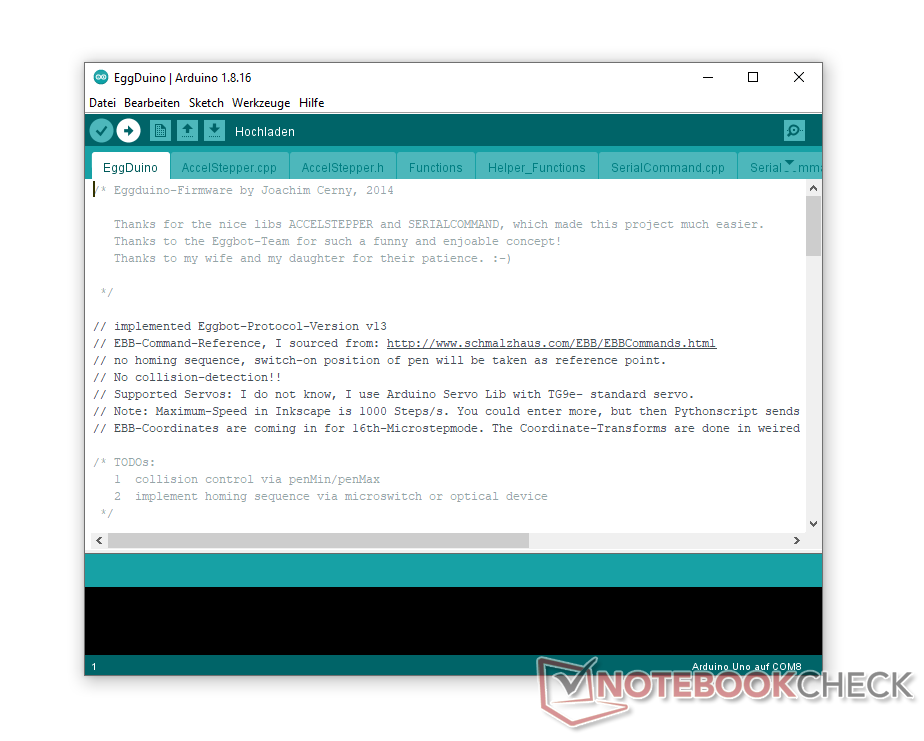
Após a instalação da IDE Arduino, abra o arquivo EggDuino-master.zip e desempacote-o na pasta Documentos/Arduino do usuário. Para que a IDE possa trabalhar com o conteúdo da pasta, ela deve ser renomeada para EggDuino. Clique duas vezes em EggDuino.ino na pasta renomeada EggDuino para abrir o arquivo. Agora você pode conectar o Arduino Uno (clone) ao computador através do cabo USB. Selecione a placa com Ferramentas>Port. Em seguida, você carrega o programa como ele é. Mais tarde, tudo é conectado de forma que o pinout programado corresponda.
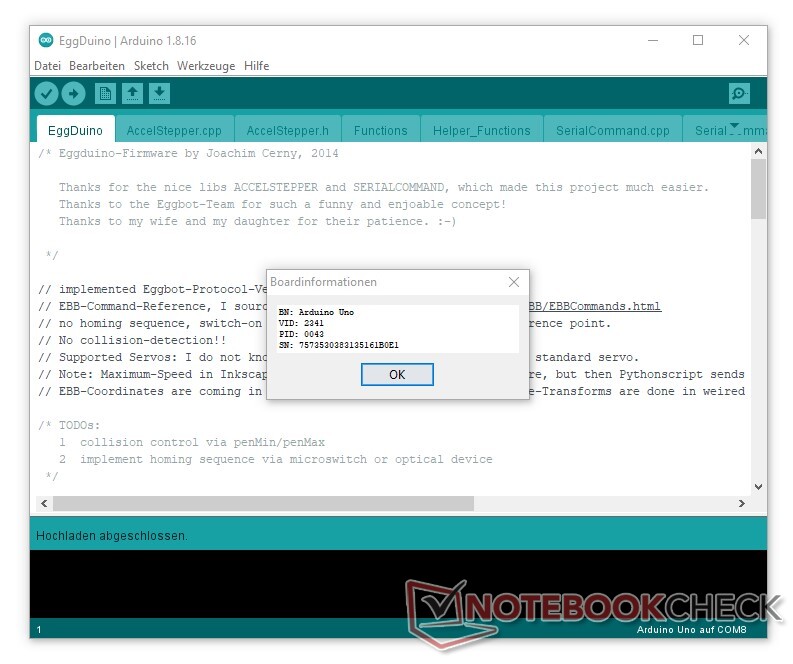
A identificação do hardware da placa de desenvolvimento é necessária para adaptar a extensão EggBot para o Inkscape ao EggDuino na próxima etapa. Esta identificação pode ser recuperada com a IDE Arduino através de Ferramentas>Recobrir informações da placa. VID e PID podem ser copiados pelo CTRL+C e depois colados em um arquivo de texto.
Instalação e modificação da extensão EggBot
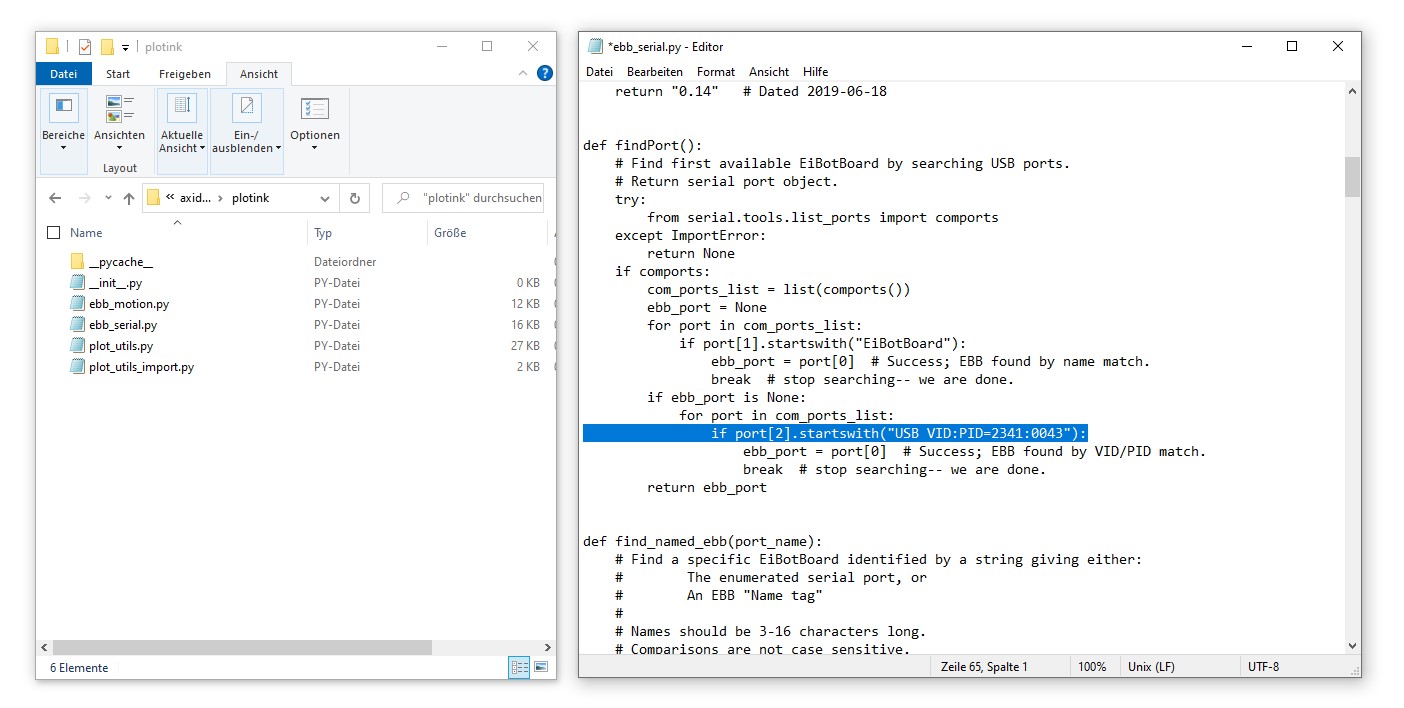
O arquivo zip eggbot-inkv1r2.zip contém a extensão EggBot completa para Inkscape. No entanto, esta extensão tem que ser adaptada ao EggDuino antes de poder ser integrada ao Inkscape. Primeiro descompacte o arquivo em um local arbitrário. Na pasta desempacotada, procure o arquivo ebb_serial.py. Este está localizado sob a pasta eggbot-inkv1r2axidraw_depsplotink. Aberto com o editor, o script Python pode ser editado. Na linha 65 [ if port[2].startswith("USB VID:PID=04D8:FD92"): ] o ID do hardware do EggBot original é procurado pelo script. Isto deve ser alterado para o Eggduino com os valores previamente determinados para VID e PID.
Assim, no meu caso, a nova linha é: [ se a porta[2].inicia com("USB VID:PID=2341:0043"): ]
Já que nem todo Arduino Uno e seus clones têm o mesmo ID de hardware, a simples cópia da minha mudança pode não levar ao sucesso.
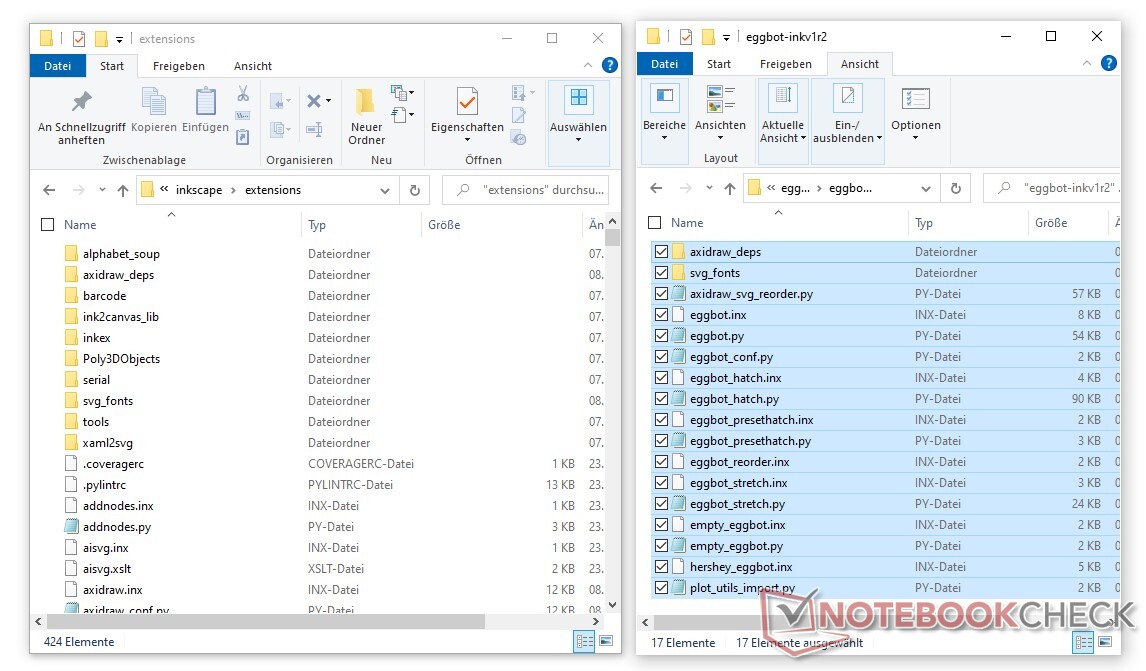
Após salvar a modificação, o conteúdo completo da pasta eggbot-inkv1r2 será transferido para a pasta de extensões do Inkscape 1.1. Se o diretório de instalação padrão não tiver sido alterado durante a instalação, ele está localizado em:
C:Program FilesInkscapeextensions
Se você abrir agora o Inkscape, deverá ser possível encontrar o Eggbot em Extensões.
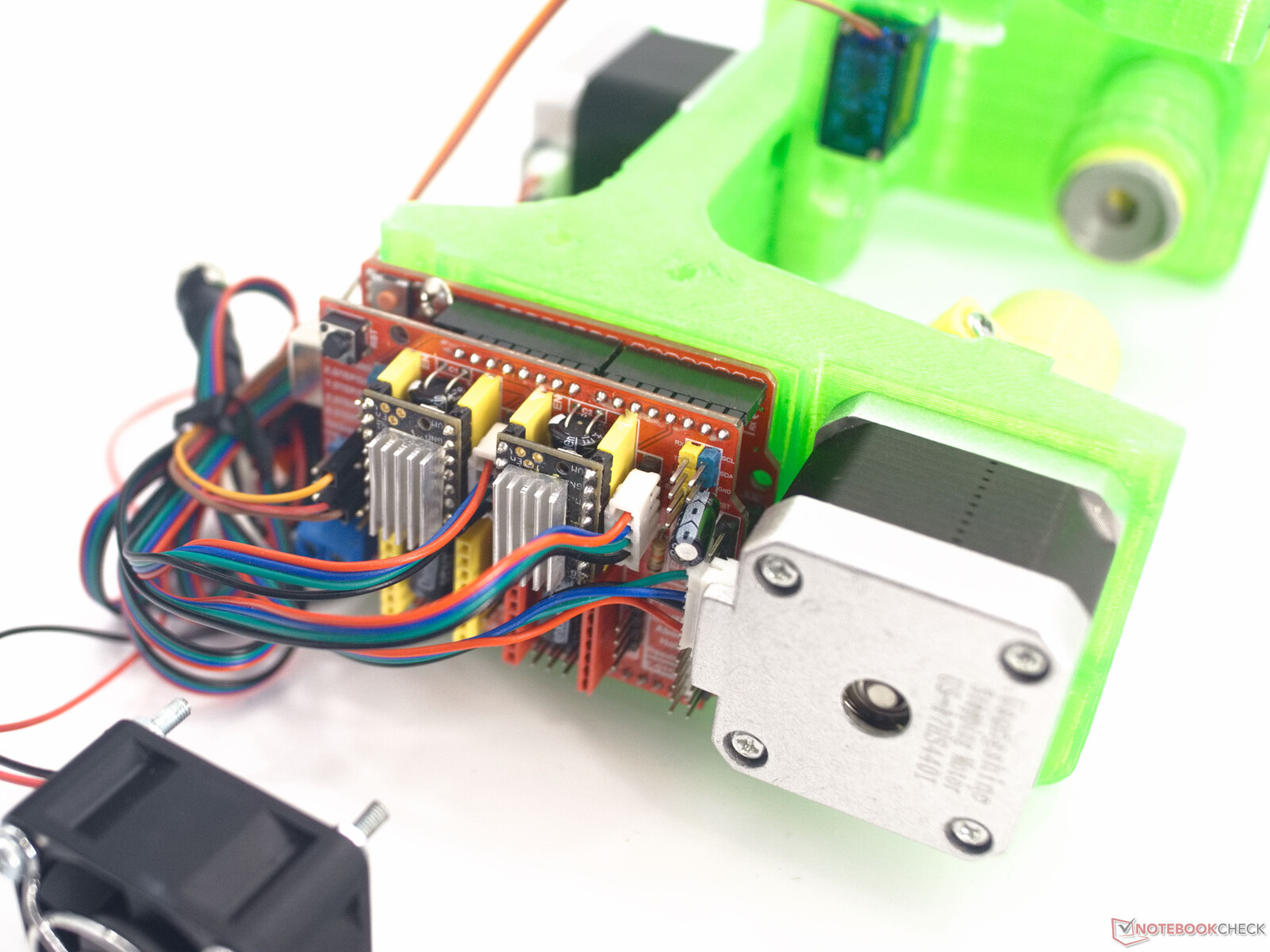
Assembléia
A montagem geral dos componentes deve ser simples, mas lidar com a fiação pode ser um pouco complicado. Como o Arduino Uno é muito clemente, os erros não são, em geral, um grande problema
motoristas de motor passo-a-passo
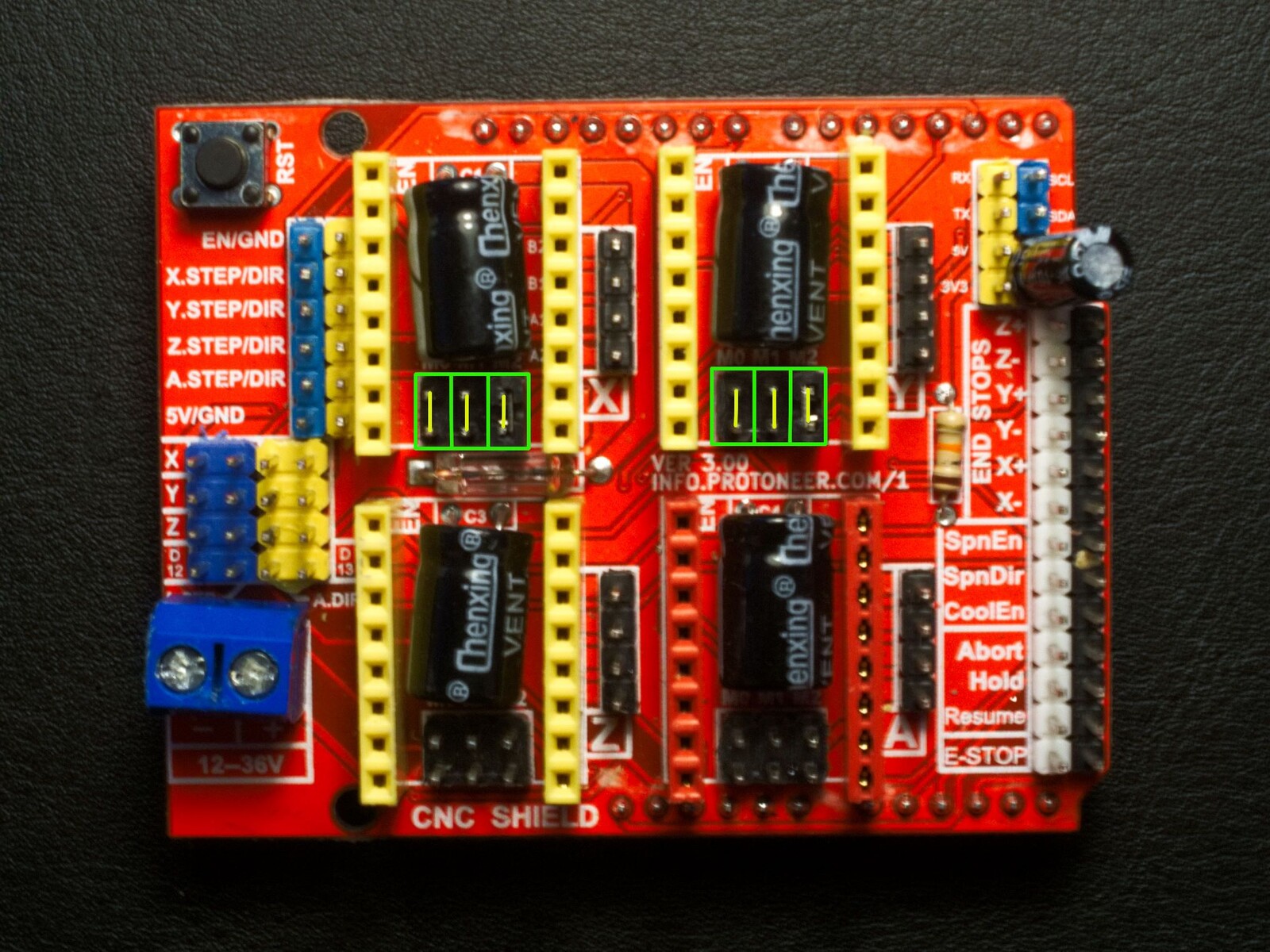
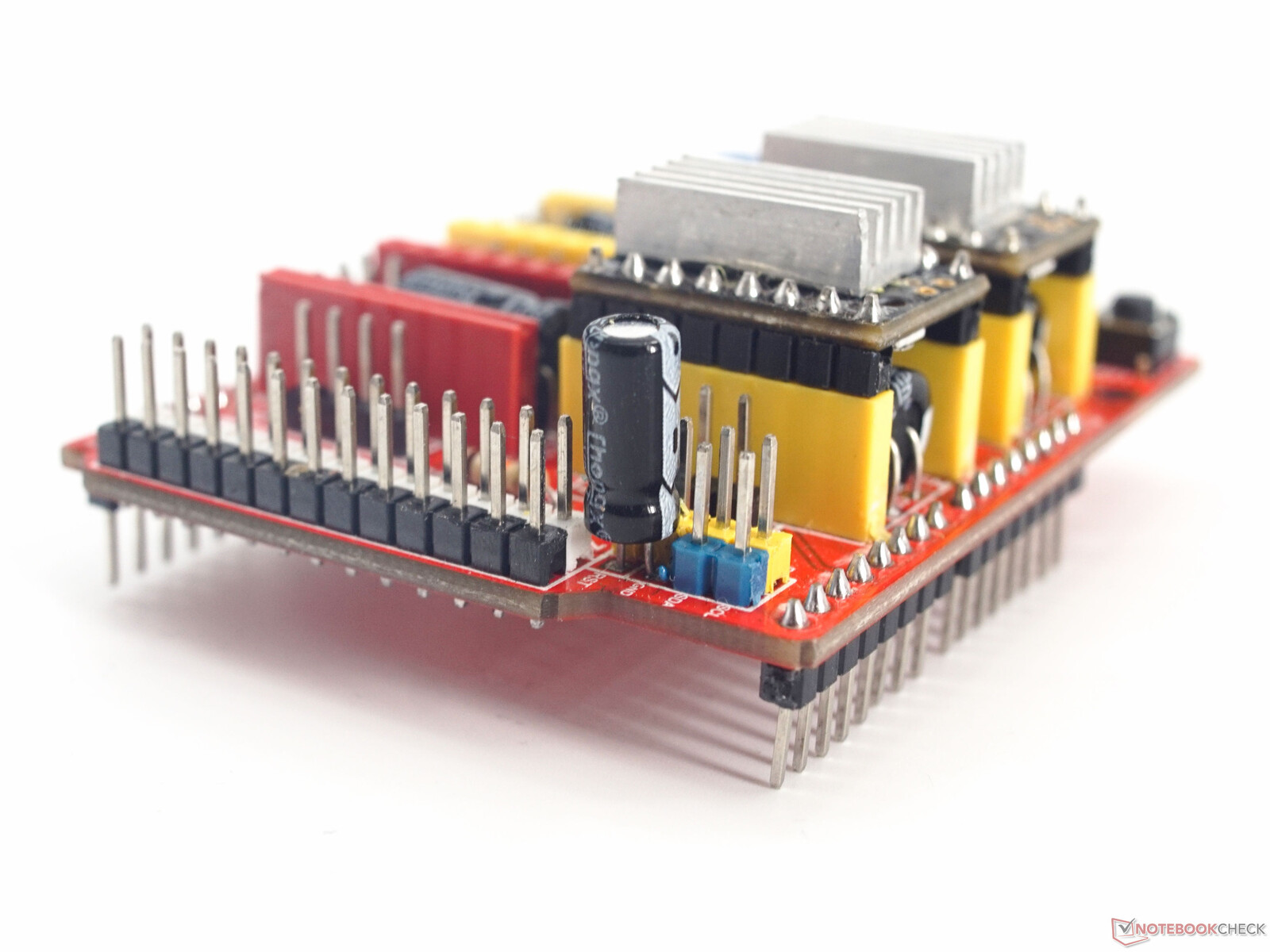
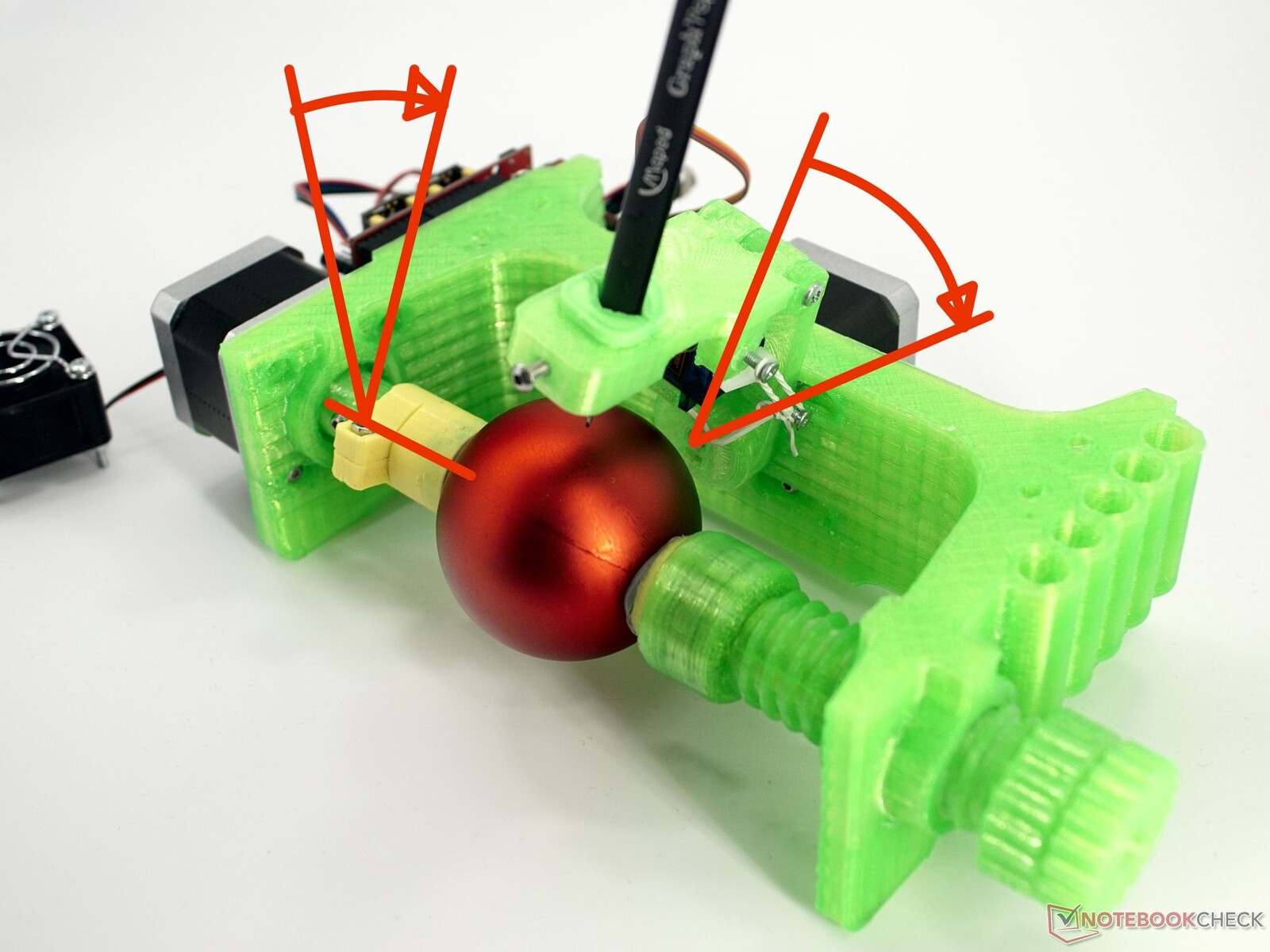
Primeiro, os jumpers devem ser ajustados para ajustar o micro-passo. Dependendo do motorista do motor passo-a-passo, os jumpers devem ser ajustados de forma diferente. A idéia é conseguir 1/16 micro-passo. Com os A4988-drivers incluídos no kit CNC do link acima, todos os três jumpers devem ser ajustados. Na figura à direita, os lugares correspondentes estão marcados a verde e as conexões amarelas. M0, M1 e M2 têm que ser conectados. Para o Eggbot são necessários apenas os motores X e Y
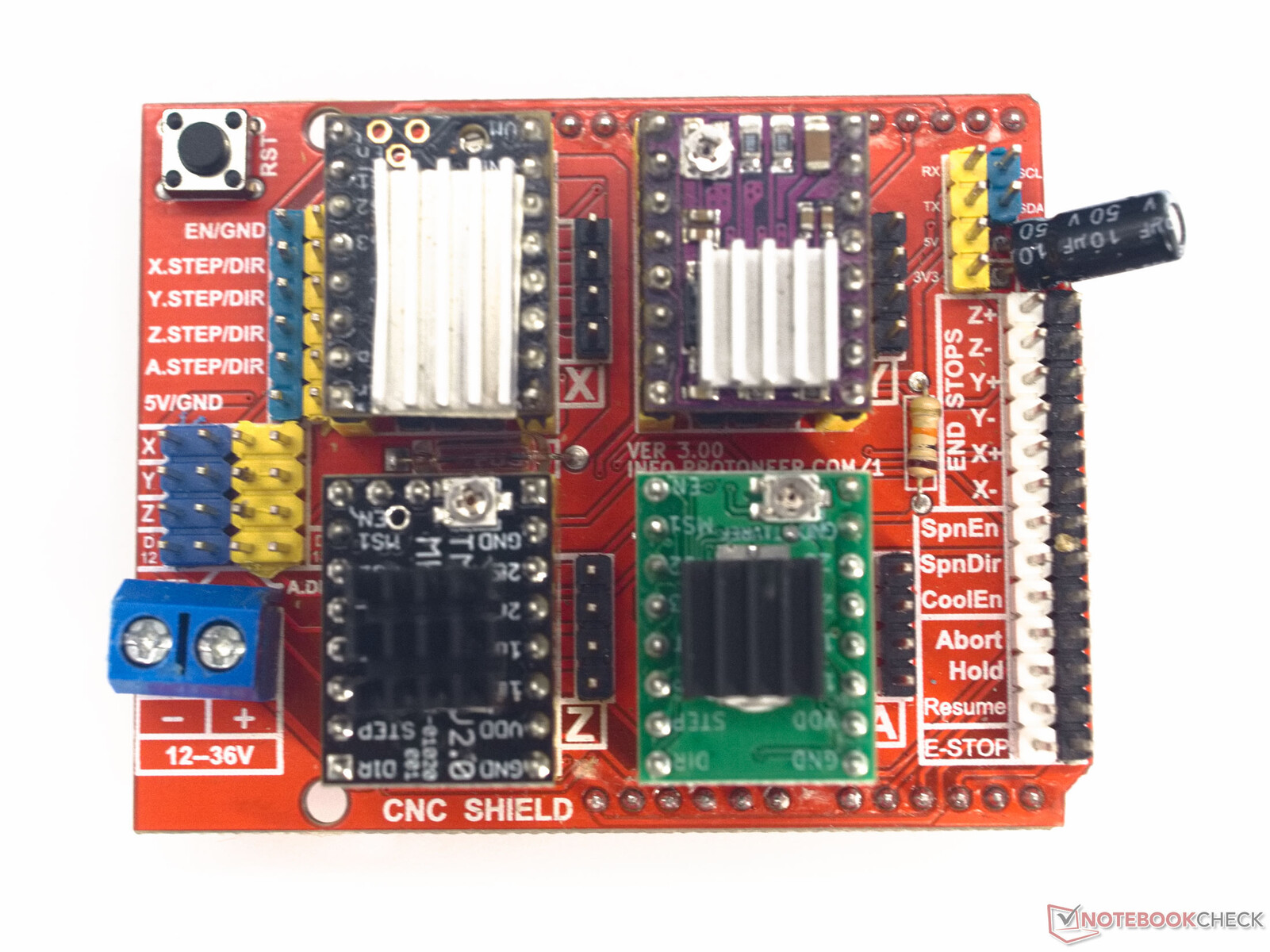
No passo seguinte, os dissipadores de calor são colados nos motores de passo e os motoristas são encaixados nos slots para X e Y. Aqui você tem que prestar atenção ao alinhamento. Normalmente, o pino EN é marcado em todos os motoristas de motores passo-a-passo compatíveis com Pololu. Isto deve ser conectado ao EN-socket na proteção CNC, somente então o alinhamento está correto
Consulte a folha de dados do respectivo fabricante para obter informações sobre tensões e ajustes para o micro-passo e corrente.
Desativando o rearme automático do Arduino Uno
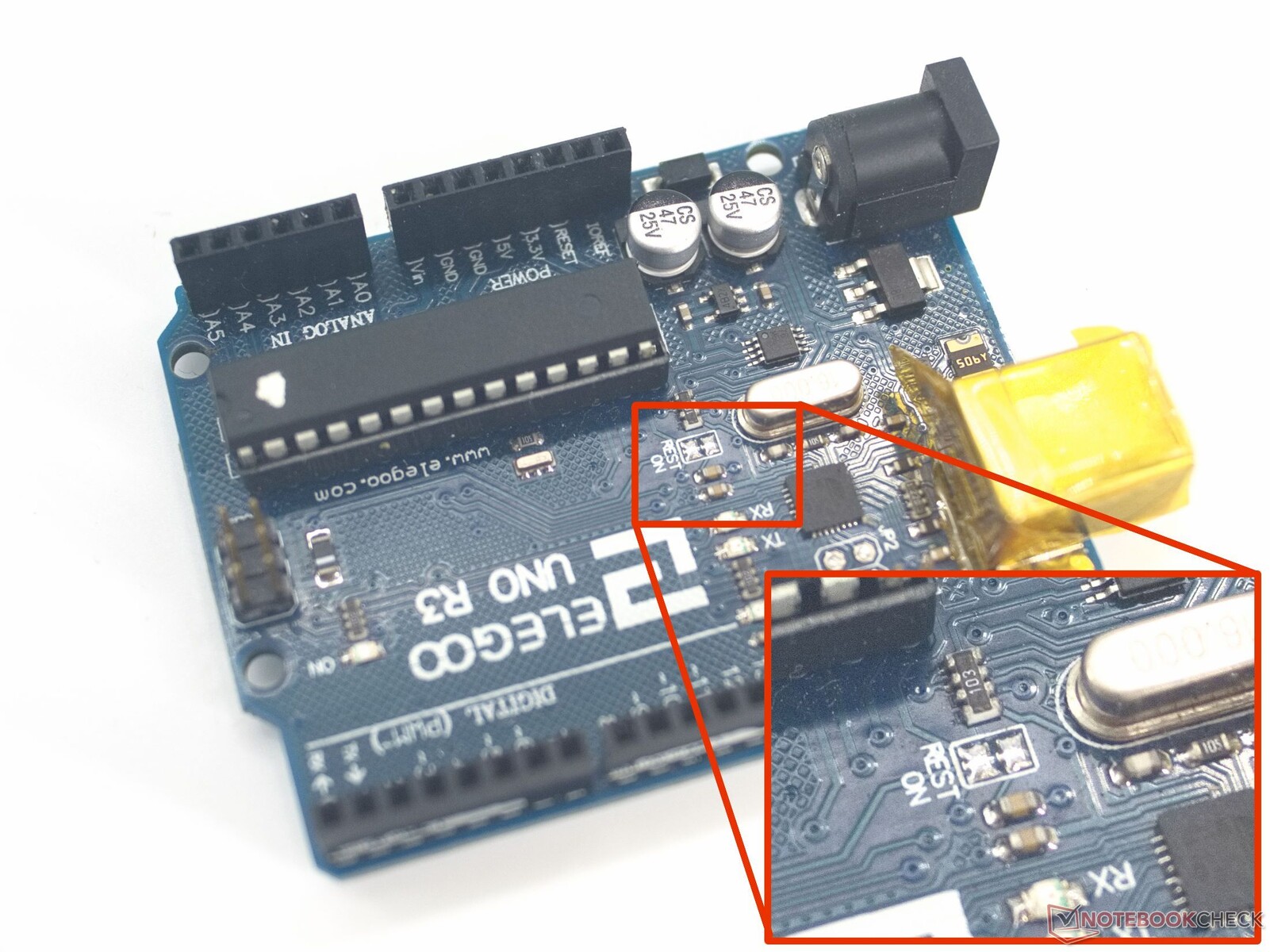
Para uma conexão adequada com o Inkscape, é necessário desativar o rearme automático no Arduino. A primeira possibilidade é desconectar um contato no Arduino UNO. Nas placas há sempre um contato de jumper, que é marcado como REST-EN ou REST-ON. Depois que a placa é programada, este contato pode ser desconectado com uma faca. Se você precisar do auto-reset novamente, você pode configurar uma ponte de solda.
Também é possível desativar o auto-reajuste com um capacitor entre o pino de reset e o pino GND na proteção CNC. O capacitor deve ter uma capacidade de pelo menos 10 µF. Um condensador eletrolítico é soldado com seu pino negativo no pino GND da blindagem do CNC. Os capacitores de cerâmica e de folha de alumínio não têm polaridade. A resistência dielétrica do capacitor deve ser pelo menos 1,5 vezes a tensão da fonte de alimentação selecionada.
Cablagem
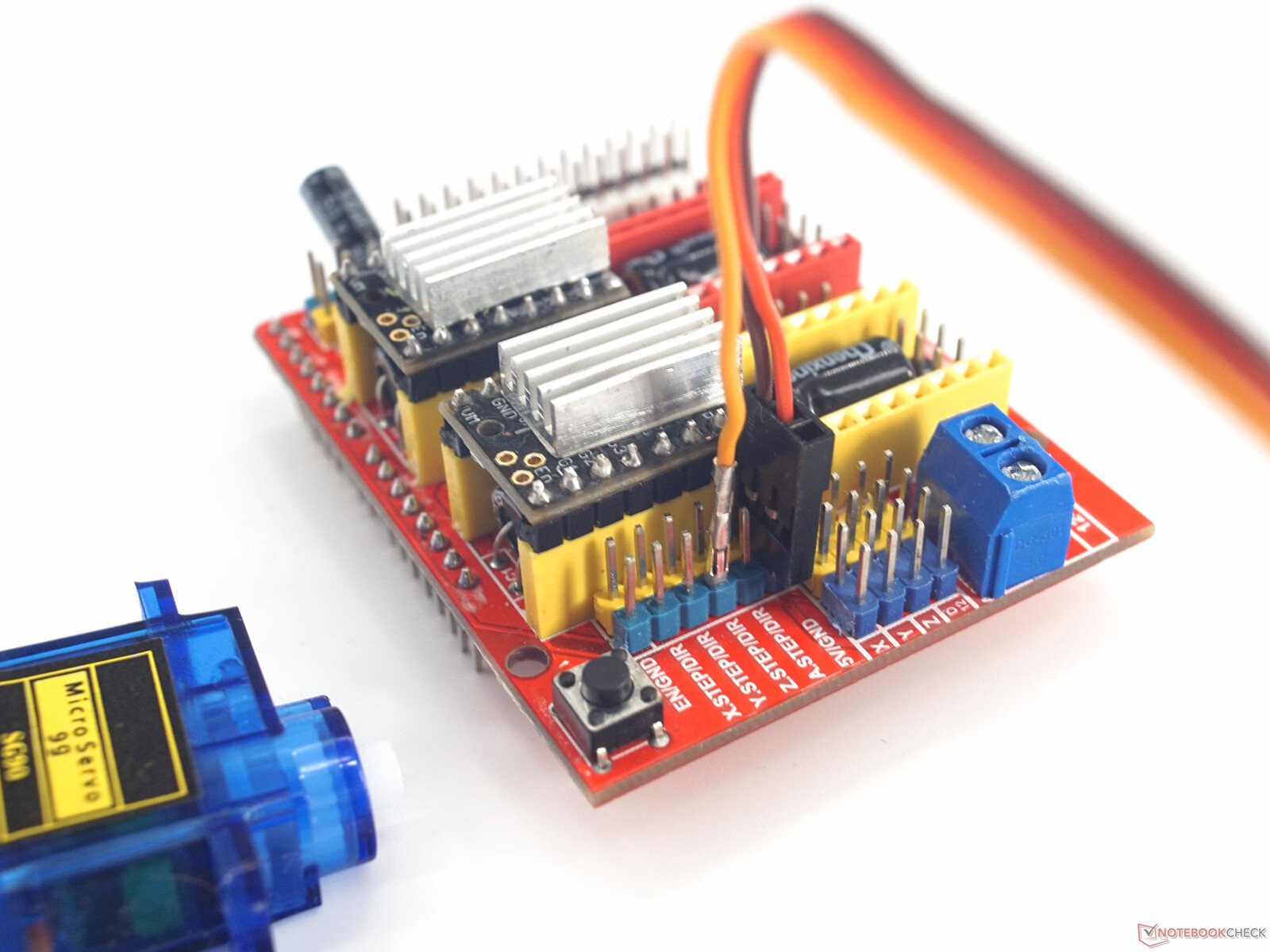
Todos os Eggbots usam dois motores passo-a-passo e um servo. O motor passo-a-passo que gira a bola ou o ovo é conectado aos contatos do X-condutor, o motor passo-a-passo para o braço da caneta é conectado aos contatos ao lado do Y-condutor. A maneira como os dois conectores são conectados muda apenas o sentido de rotação. Isto pode ser revertido mais tarde no Inkscape.
Os três fios do servo motor são conectados aos pinos de 5V, GND e Z.STEP do CNC-Shield. O cabo preto para GND, o vermelho para 5V e o amarelo para Z.STEP.
Configuração de software e plotagem
Uma vez tudo montado, o Arduino pode ser conectado ao PC e o CNC-Shield à fonte de alimentação. Em Inkscape você agora chama o painel de controle do Eggbot, e aqui você ainda tem que definir os ajustes para o servo motor e o sentido de rotação para os motores passo-a-passo. Para encontrar os ajustes corretos, você tem que realizar algumas experiências.
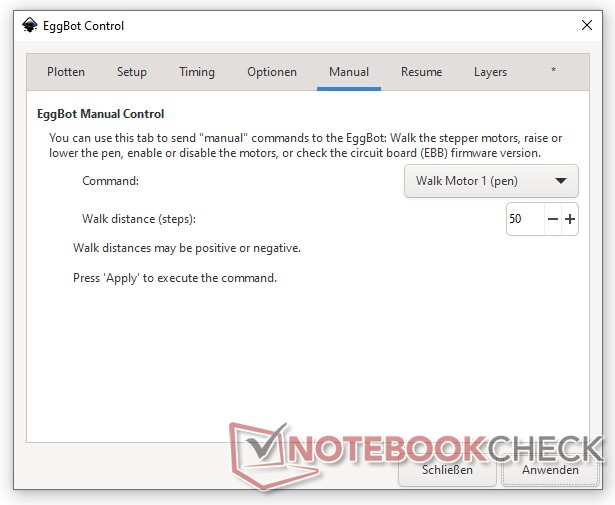
Na aba Manual, você pode primeiro determinar o sentido de rotação do braço da caneta. Selecione Walk Motor 1 (Caneta) no menu suspenso e digite um valor positivo abaixo e clique em Aplicar. A caneta deve agora se mover em direção à ponta do enfeite com o gancho de ornamento. Assim, dependendo de qual caminho você quer prender as bolas, este é para a esquerda ou para a direita. Repita o mesmo processo com o item de menu selecionado, Walk Motor 2 (Egg). A bola deve girar no sentido horário quando vista a partir do ponto de suspensão.
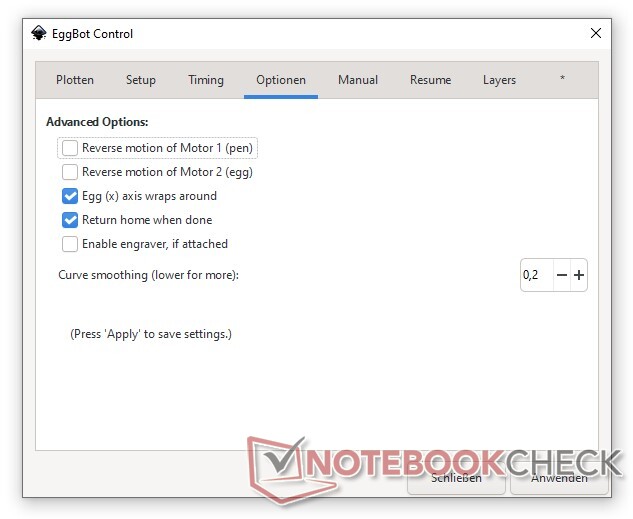
Se as direções de rotação não corresponderem, a caixa de seleção Movimento inverso do Motor deve ser definida ou apagada para o motor correspondente na guia Opções.
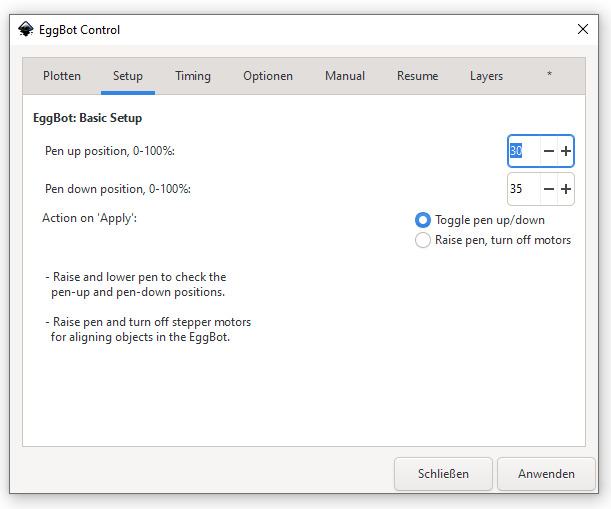
Os valores do servo motor também devem ser ajustados. Aqui depende se você tem um servomotor com sentido de rotação positivo ou negativo. No meu caso, o valor a ser ajustado no Eggbot Control Setup para a posição "pen-up" é menor do que a posição "pen-down". Talvez você tenha que tentar alguns valores para encontrar os valores corretos.
Plotagem
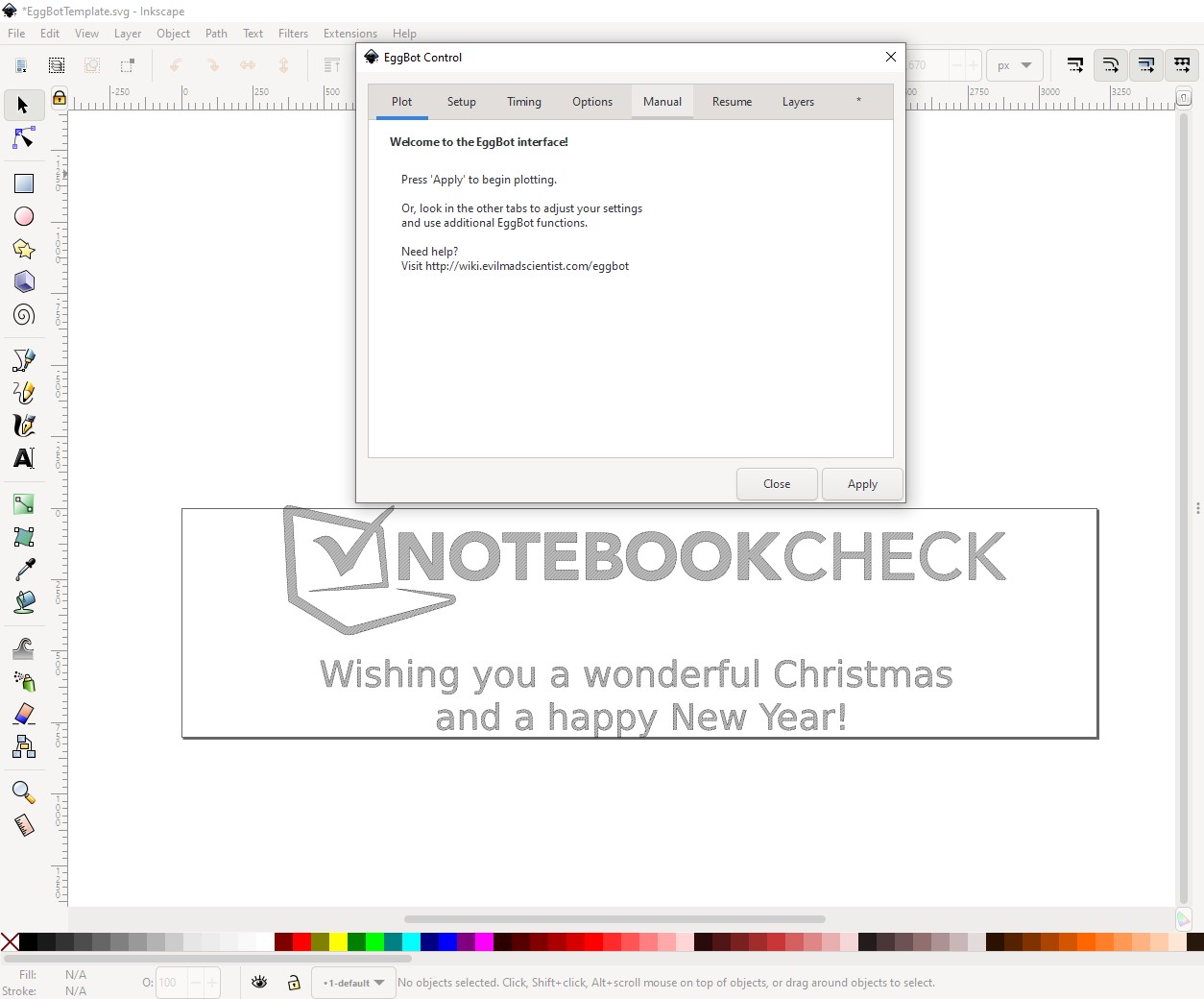
Uma vez tudo montado, instalado e montado, você pode finalmente começar a desenhar. No arquivo EggBotExamples_v281.zip estão alguns modelos para diferentes ocasiões. Estes podem ser carregados, modificados e desenhados como se fosse de seu desejo. O arquivo EggBotTemplate.svg serve como um modelo para seus desenhos. Ao abrir alguns modelos, o Inkscape provavelmente perguntará se algo deve ser alterado nos arquivos, uma vez que eles foram criados com uma versão mais antiga do Inkscape. A nova extensão Eggbot foi adaptada ao Inkscape 1.1 de forma que você tem que selecionar "Este arquivo é destinado à exibição na tela[...]" aqui, caso contrário, a saída no Eggbot será distorcida.
Com o projeto terminado, você não precisa fazer mais nada além de plotá-lo através do Centro de Controle Eggbot. Basta clicar em "Aplicar" na guia Plot.

Fontes

