Pesquisadores da ETH Zurich revelam um robô de IA ANYmal de quatro patas capaz de completar percursos de obstáculos como os K-9s no campo de treinamento

ETH Züpesquisadores ricos em robótica revelaram um robô ANYmal de quatro pernas capaz de navegar em terrenos complexos usando módulos de IA altamente treinados para movimento, visão e localização. Esses módulos de última geração ampliam a gama de obstáculos e terrenos em que os robôs quadrúpedes podem navegar de forma independente.
Já foi demonstrado que os "cães" robóticos conseguem navegar em passarelas limpas e corredores de edifícios, bem como em colinas e terrenos externos, mas dependiam de humanos para orientar o treinamento, de longos tempos de computação para determinar a melhor maneira de se mover ou de conhecimento prévio do ambiente. A pesquisa rica da ETH Züa rica pesquisa contorna essas limitações, e o ANYmal é capaz de se recuperar dinamicamente de quedas e navegar em superfícies complexas, apesar de ser totalmente treinado em uma Nvidia Isaac Gym simulação sem supervisão.
Três módulos que compõem o cérebro da IA
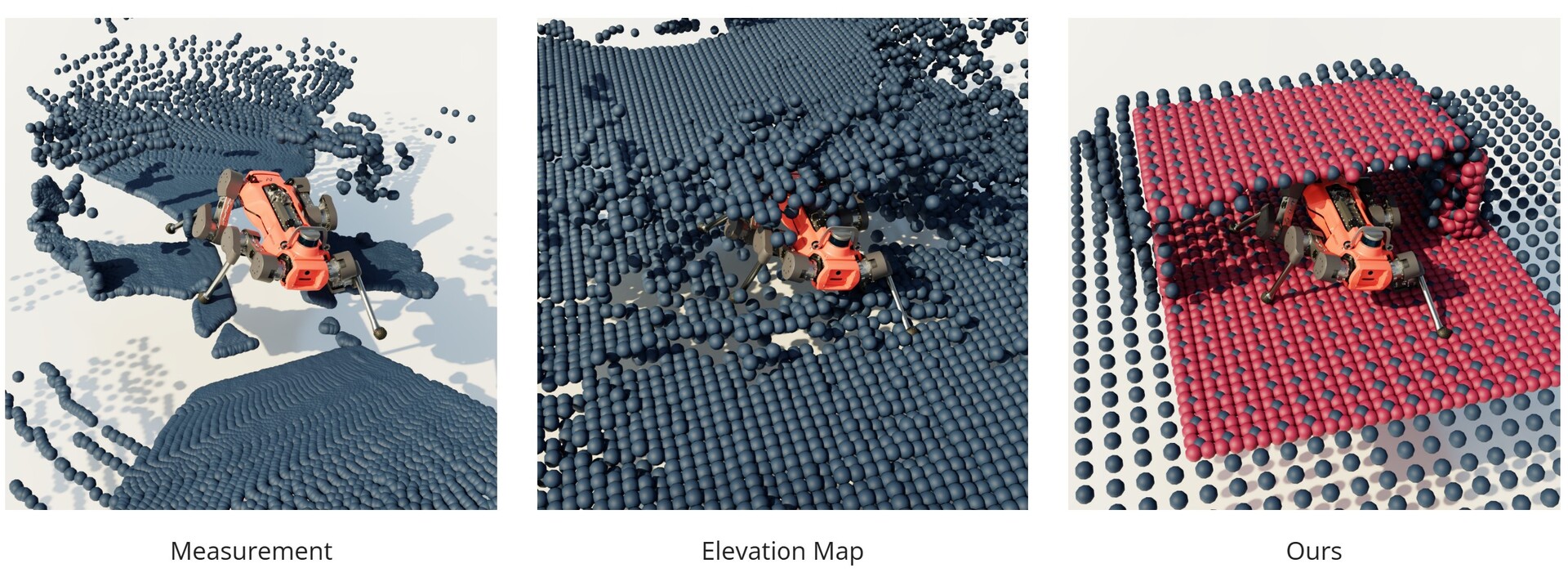
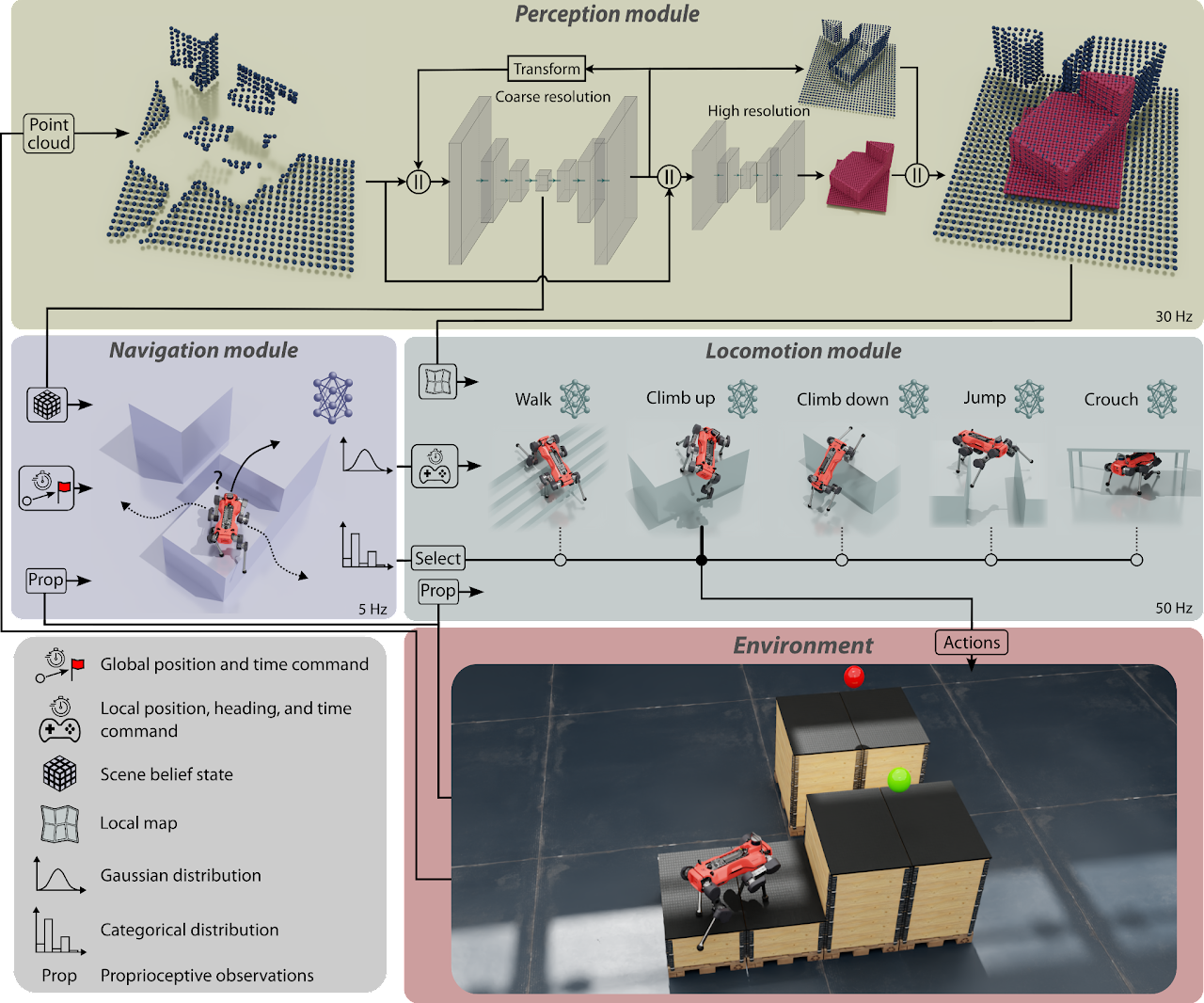
O módulo de visão vê o mundo usando seis câmeras de profundidade Intel Realsense e um Velodyne LiDAR alimentado por um controlador Nvidia Jetson Orin controlador. Como o escaneamento a laser e infravermelho retorna apenas a posição de pontos individuais, os robôs enfrentam obstáculos para navegar por baixo de obstáculos ou para locais mais altos devido à falta de informações. Os pesquisadores da ETH contornam esse problema reconstruindo o mundo em 3D a partir das digitalizações.
O módulo de movimento contém cinco ações: descer, subir, agachar, pular e andar. Cada uma delas foi treinada sob desafios cada vez mais difíceis. Por exemplo, o robô virtual foi treinado para se agachar sob mesas cada vez mais baixas enquanto se movia para frente, ou saltar de uma plataforma para outra enquanto a distância aumentava.
O módulo de navegação pega o que o módulo de visão vê e aprende a combiná-lo com o rumo, a posição e o tempo que cada habilidade de movimento exige para concluir cursos simulados difíceis. O módulo foi treinado em 3.000 percursos de teste e aprendeu a navegar com mais de 96% de sucesso.
ANYmal em ação
Depois que os três módulos foram treinados em simulação, o cérebro do software de IA foi instalado em um robô ANYmal D de 55 kg, equipado com dois conjuntos de CPU Intel i7, 8 GB de RAM e SSD de 240 GB. O vídeo do ANYmal completando cursos na vida real mostram sua capacidade hábil de superar rapidamente terrenos desafiadores e obstáculos que impediriam outros robôs.
Os leitores interessados em desenvolver habilidades em robótica devem adquirir um kit(como este na Amazon) juntamente com um livro para aprender sobre robôs(como este na Amazon).
Fonte(s)

