"O futuro está aqui": Por que este robô humanoide precisa de quatro braços
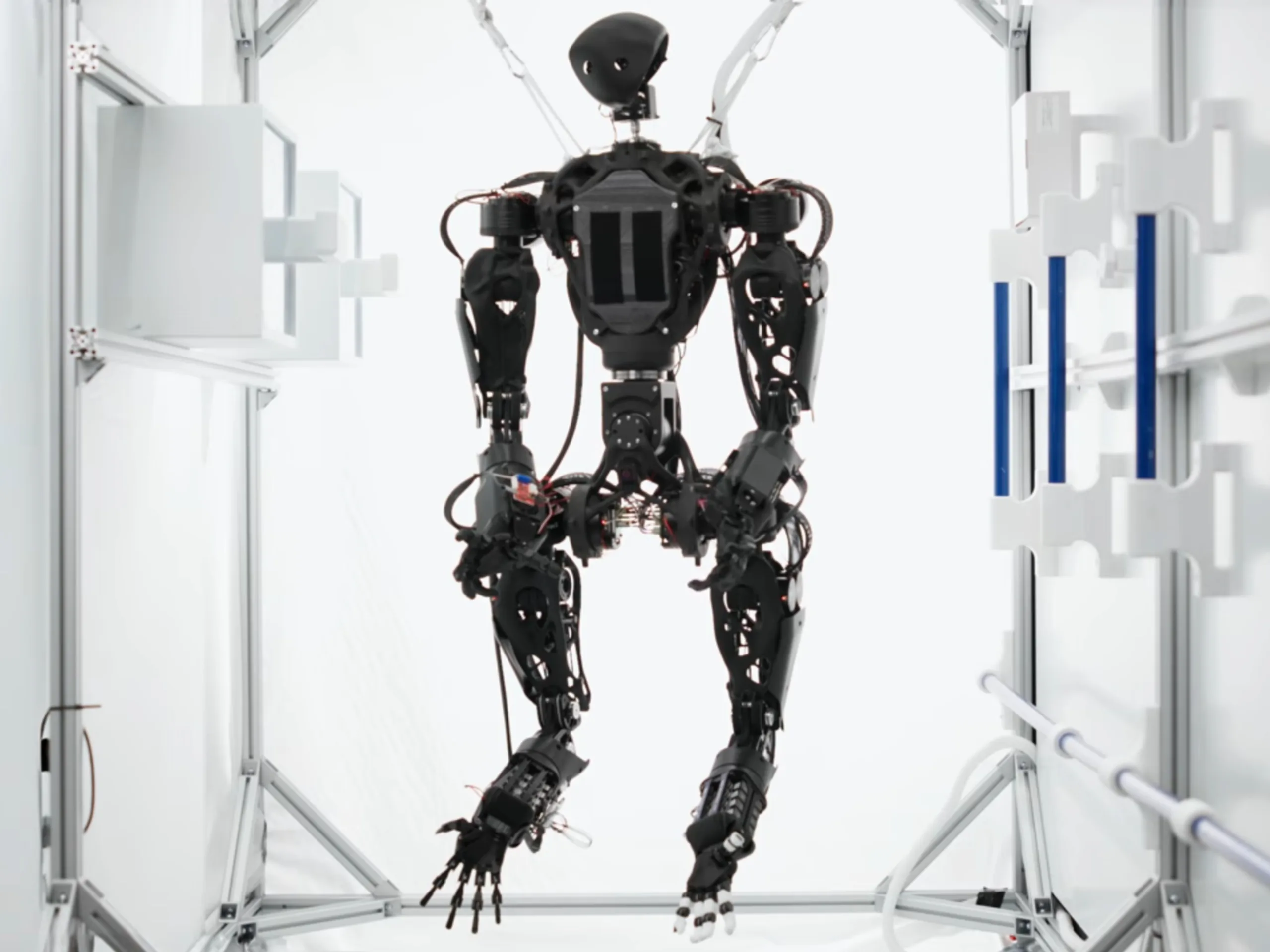
Em 21 de maio de 2026, o projeto suíço ETH Focus Project ORBIT Robotics apresentou seu modelo Helios. O vídeo que o acompanhava foi intitulado "O futuro está aqui " - uma descrição que parece bastante adequada. O Helios tem ainda mais charme de ficção científica do que os conhecidos robôs humanoides, como o Optimus da Tesla ou o G1 da Unitreeda Unitree, pois foi desenvolvido especificamente para uso no espaço.
O ORBIT Robotics Helios destina-se a apoiar os astronautas nas estações espaciais no futuro. De acordo com o projetoo senhor está se perguntando se o Helios é um robô de carga, pois, de acordo com o projeto, uma grande quantidade de tempo é gasta em tarefas que são necessárias, mas que oferecem pouco valor científico. Isso inclui fluxos de trabalho de carga e inventário, como descarregar entregas, classificar equipamentos e registrar níveis de estoque. O ORBIT cita cerca de 35% do tempo da tripulação para tarefas de manutenção, cerca de 50 horas para um único ciclo de descarregamento de carga e custos de mão de obra de aproximadamente 140.000 dólares americanos por hora de astronauta. O Helios foi projetado para tornar o trabalho no espaço mais barato e mais eficiente. Mas por que o robô precisa de quatro braços?
Os braços são mais úteis do que as pernas na microgravidade
Ficar em pé e andar só funcionam sob a gravidade. Na microgravidade, as pernas são praticamente inúteis e podem, no máximo, ser usadas para empurrar superfícies. É por isso que a ORBIT Robotics simplesmente substituiu as pernas de seu robô humanoide por dois braços adicionais, que são muito mais úteis na ausência de peso ou na microgravidade. Isso deve permitir que o robô se mova pelo interior da estação, mantenha sua posição e execute tarefas ao mesmo tempo.
O Helios também é interessante do ponto de vista técnico. Seus braços não são movidos da maneira convencional por motores pesados colocados diretamente nas articulações, mas por um projeto acionado por tendões. Os motores ficam próximos aos ombros, enquanto carretéis, cabos e mecanismos de redirecionamento transferem a força para as articulações. O objetivo é tornar os braços mais leves e permitir movimentos mais suaves. A chamada junta de contato rolante no cotovelo desempenha um papel importante aqui. Essa articulação foi projetada para combinar resistência e conformidade - robusta o suficiente para tarefas operacionais e, ao mesmo tempo, permitindo movimentos controlados e suaves.
Fonte(s)
Robótica Orbit via YouTube
Robótica Orbital

